WORLD
ACTION
MODEL
在交互中理解物理世界
Large-Scale Observation
Diverse robot operation videos, human demonstrations, and proprioceptive recordings — providing broad priors about objects, motion, and environmental dynamics.
 Human Demonstrations
Human Demonstrations Videos
Videos Language
Language Proprioception
ProprioceptionTactile-Augmented Simulation & Training
Simulation generates diverse interaction variants at scale — augmented with tactile signal modeling to better reflect real contact dynamics.
Real-world tactile data from Sentra continuously recalibrates simulation parameters, ensuring virtual training remains grounded in physical reality.
Real Interaction Data
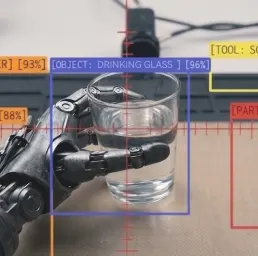
High-fidelity tactile interaction data capturing force dynamics, contact transition, and material response — the physical ground truth that vision cannot provide.
 Contact Force Maps
Contact Force Maps Tactile Deformation
Tactile Deformation Material Response
Material Response Slip Detection
Slip Detection 3D Force Signals
3D Force SignalsWorld Action Models
PREDICTIONS GROUNDED IN HOW THE WORLD CAN BE ACTED UPON
NOT JUST HOW IT LOOKS
Inputs
 Vision
Vision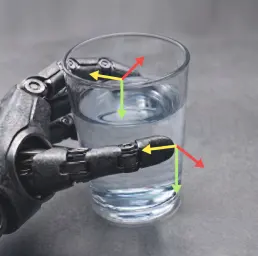 Tactile
Tactile Language
Language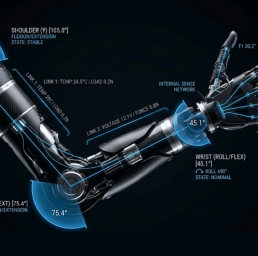 Proprioception
ProprioceptionOutputs
 Physical Future Prediction
Physical Future Prediction Continuous Action Policy
Continuous Action PolicyIn contact-rich tasks, tactile signals provide continuous feedback on force, slip, and material response — revealing actionable affordances that guide stable execution through every phase of contact.
Physical interaction follows causal laws — not visual patterns. By grounding models in tactile physics, skills learned in one context transfer to unseen objects and environments without task-specific retraining.
Force, compliance, and contact dynamics are the universal language of physical interaction. Models trained on one platform transfer across robot morphologies — reducing deployment cost for every new embodiment.



